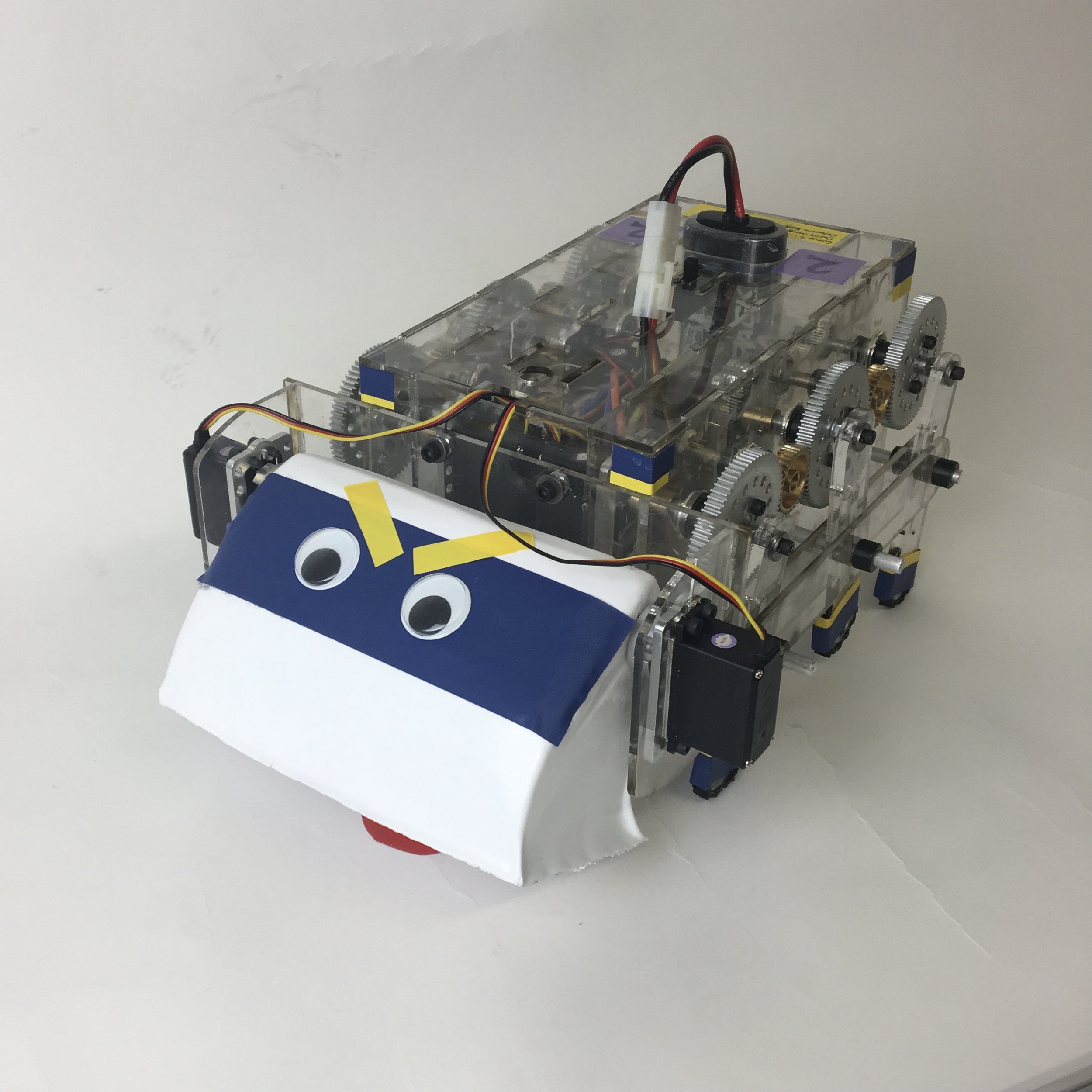
Meet Steph Scurry
For my Machine Engineering course, we were tasked with designing a scuttling remote controlled robot to compete in a modified soccer tournament where it would control, pass, and shoot a tennis ball.
Our design focused on capturing and maintaining possession of the ball with our front scoop. Our walk cycle was balanced with front and back legs paired with the middle leg of the opposite side. This allowed us to easily maneuver the course and to have high accuracy in passing and shooting.